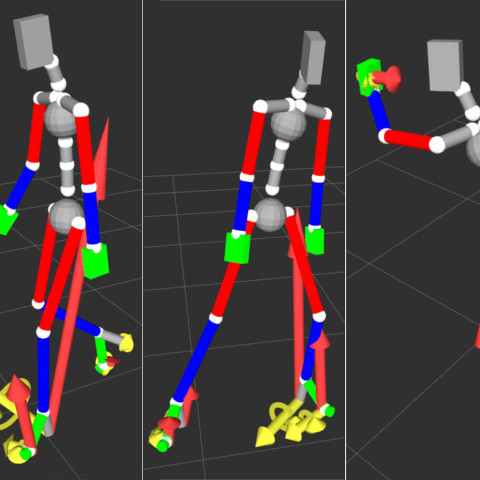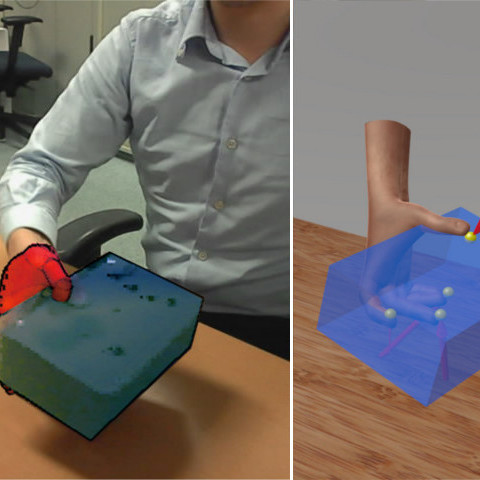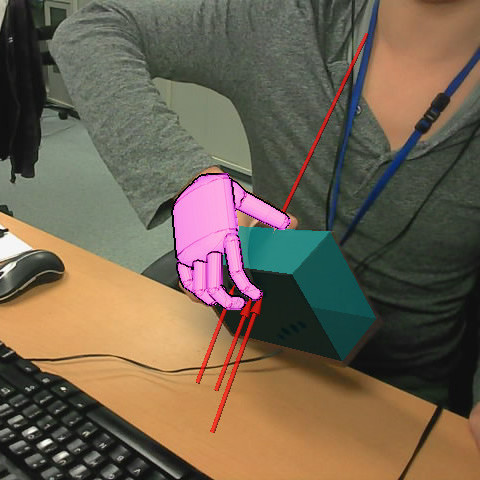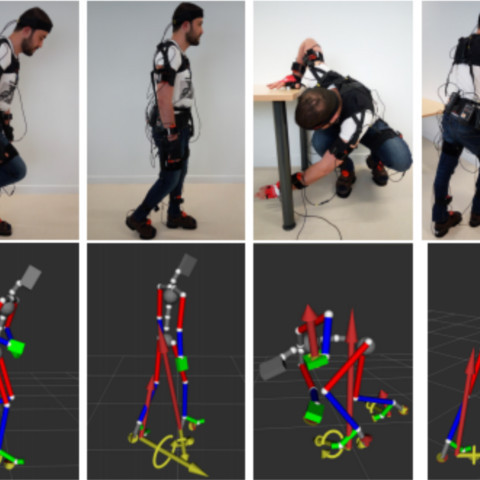
We present a novel technique that unobtrusively estimates interaction forces exerted by human participants in multi-contact interaction with rigid environments. Our method uses motion capture only, thus circumventing the need to setup cumbersome force transducers at all potential contacts between the human body and the environment. This problem is particularly...
[Read More]