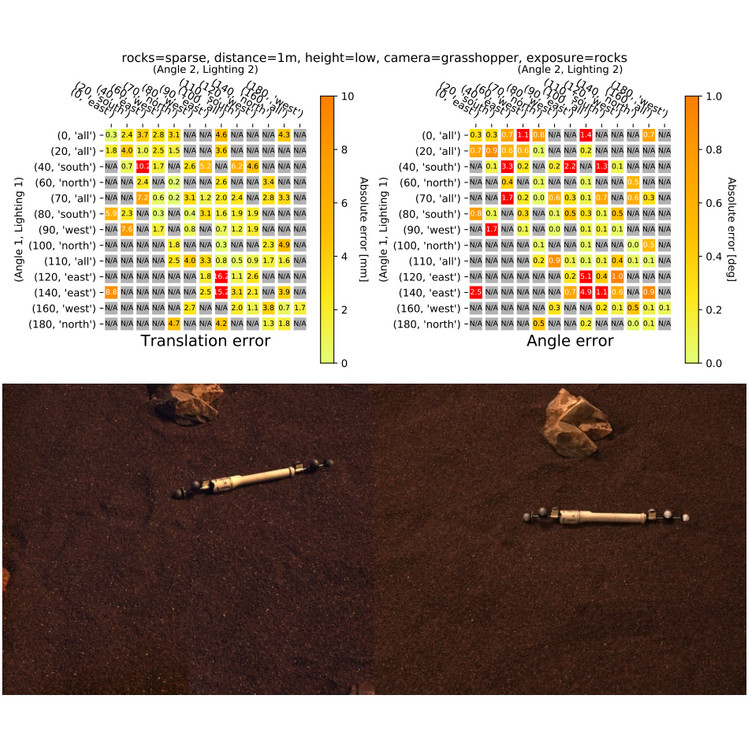
We consider the problem of rover relocalization in the context of the notional Mars Sample Return campaign. In this campaign, a rover (R1) needs to be capable of autonomously navigating and localizing itself within an area of approximately 50×50m using reference images collected years earlier by another rover (R0). We...
[Read More]